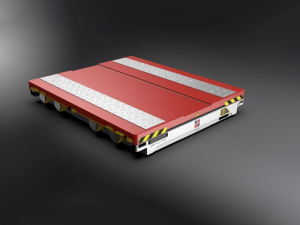
4D শাটল সিস্টেম স্ট্যান্ডার্ড টাইপ
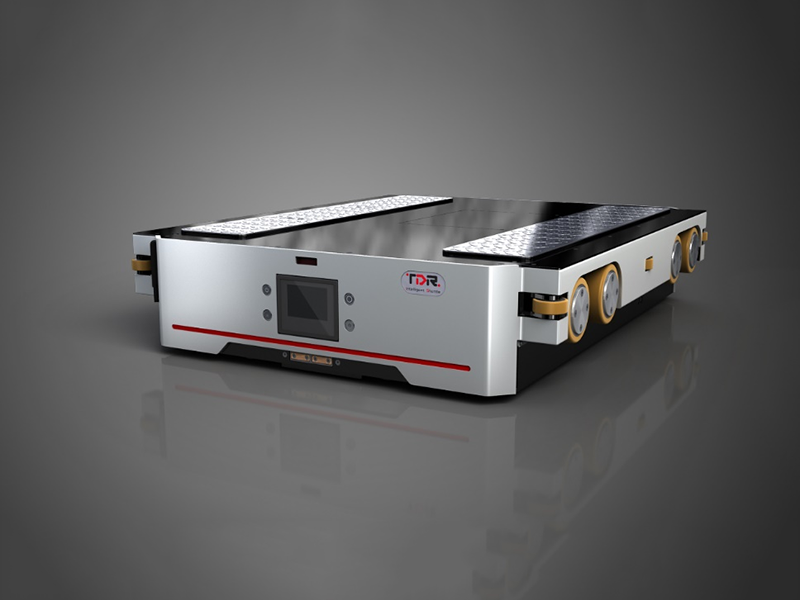
উল্লম্ব এবং অনুভূমিক গাড়িটি দুটি সেট ড্রাইভ সিস্টেম এবং দুটি সেট জ্যাকিং সিস্টেম দিয়ে গঠিত। দুটি সেট ড্রাইভ সিস্টেম প্রাথমিক এবং মাধ্যমিক আইলগুলির হাঁটার জন্য দায়ী; দুটি সেট জ্যাকিং সিস্টেমের মধ্যে একটি পণ্য উত্তোলনের জন্য দায়ী, এবং অন্যটি প্রাথমিক এবং মাধ্যমিক আইলগুলি চালানোর জন্য দায়ী। স্যুইচিং; প্রধান চ্যানেল এবং মাধ্যমিক চ্যানেল উভয়ই ডিসি ব্রাশলেস সার্ভো অপারেশন গতি নিয়ন্ত্রণ গ্রহণ করে, গতি নিয়ন্ত্রণ বক্ররেখা মসৃণ এবং অপারেশন স্থিতিশীলতা ভাল। প্রধান জ্যাকিং এবং মাধ্যমিক জ্যাকিং ডিভাইস উভয়ই ব্রাশলেস ডিসি মোটর ব্যবহার করে, যা উত্থান এবং পতনের জন্য র্যাক এবং পিনিয়ন প্রক্রিয়ার উপর নির্ভর করে।
উল্লম্ব এবং অনুভূমিক গাড়িটিতে পাঁচটি মোড রয়েছে: রিমোট কন্ট্রোল, ম্যানুয়াল, আধা-স্বয়ংক্রিয়, স্থানীয় স্বয়ংক্রিয় এবং অনলাইন স্বয়ংক্রিয়।
এটিতে একাধিক নিরাপত্তা সুরক্ষা এবং নিরাপত্তা সতর্কতা, আঞ্চলিক নিরাপত্তা অ্যালার্ম, অপারেশনাল নিরাপত্তা অ্যালার্ম এবং ইন্টারেক্টিভ নিরাপত্তা অ্যালার্ম রয়েছে।
স্ট্যান্ডার্ড ব্যবসা
রসিদ সমাবেশ এবং গুদামের বাইরে সংরক্ষণ
স্থানান্তর এবং ইনভেন্টরি চার্জিং স্তর পরিবর্তন
প্রযুক্তিগত পরামিতি
| প্রকল্প | মৌলিক তথ্য | মন্তব্য | |
| মডেল | SX-ZHC-B-1210-2T এর জন্য উপযুক্ত। | ||
| প্রযোজ্য ট্রে | প্রস্থ: ১২০০ মিমি গভীরতা: ১০০০ মিমি | ||
| সর্বোচ্চ লোড | সর্বোচ্চ ১৫০০ কেজি | ||
| উচ্চতা/ওজন | শরীরের উচ্চতা: ১৫০ মিমি, শাটল ওজন: ৩৫০ কেজি | ||
| মূল X দিকে হাঁটা | গতি | সর্বোচ্চ লোড ছাড়াই: ২.০ মি/সেকেন্ড, পূর্ণ লোড সর্বোচ্চ: ১.০ মি/সেকেন্ড | |
| হাঁটার ত্বরণ | ≤১.০ মি/সেকেন্ড2 | ||
| মোটর | ব্রাশলেস সার্ভো মোটর 48VDC 1000W | ব্রাশলেস সার্ভো | |
| সার্ভার ড্রাইভার | ব্রাশলেস সার্ভো ড্রাইভার | গার্হস্থ্য সার্ভো | |
| Y দিকে হাঁটুন | গতি | নো-লোড সর্বাধিক: ১.০ মি/সেকেন্ড, পূর্ণ লোড সর্বাধিক: ০.৮ মি/সেকেন্ড | |
| হাঁটার ত্বরণ | ≤০.৬ মি/সেকেন্ড2 | ||
| মোটর | ব্রাশলেস সার্ভো মোটর 48VDC 1000W | ব্রাশলেস সার্ভো | |
| সার্ভার ড্রাইভার | ব্রাশলেস সার্ভো ড্রাইভার | গার্হস্থ্য সার্ভো | |
| কার্গো জ্যাকিং | জ্যাকিংয়ের উচ্চতা | ৩০ মিমি | |
| মোটর | ব্রাশলেস মোটর 48VDC 750W | গার্হস্থ্য সার্ভো | |
| প্রধান জ্যাকিং | জ্যাকিংয়ের উচ্চতা | ৩৫ মিমি | |
| মোটর | ব্রাশলেস মোটর 48VDC 750W | গার্হস্থ্য সার্ভো | |
| প্রধান চ্যানেল/পজিশনিং পদ্ধতি | হাঁটার অবস্থান: বারকোড অবস্থান/লেজার অবস্থান | জার্মানি পি+এফ/সিক | |
| সেকেন্ডারি চ্যানেল/পজিশনিং পদ্ধতি | হাঁটার অবস্থান: আলোক-ইলেকট্রিক + এনকোডার | জার্মানি পি+এফ/সিক | |
| ট্রে পজিশনিং: লেজার + ফটোইলেকট্রিক | জার্মানি পি+এফ/সিক | ||
| নিয়ন্ত্রণ ব্যবস্থা | S7-1200 PLC প্রোগ্রামেবল কন্ট্রোলার | জার্মানি সিমেন্স | |
| রিমোট কন্ট্রোল | কাজের ফ্রিকোয়েন্সি 433MHZ, যোগাযোগের দূরত্ব কমপক্ষে 100 মিটার | কাস্টমাইজড আমদানি করুন | |
| বিদ্যুৎ সরবরাহ | লিথিয়াম ব্যাটারি | গার্হস্থ্য উচ্চ মানের | |
| ব্যাটারি প্যারামিটার | ৪৮ ভোল্ট, ৩০ এএইচ, ব্যবহারের সময় ≥ ৬ ঘন্টা, চার্জিং সময় ৩ ঘন্টা, রিচার্জেবল সময়: ১০০০ বার | রক্ষণাবেক্ষণ মুক্ত | |
| গতি নিয়ন্ত্রণ পদ্ধতি | সার্ভো নিয়ন্ত্রণ, কম গতির ধ্রুবক টর্ক | ||
| ক্রসবার নিয়ন্ত্রণ পদ্ধতি | WCS সময়সূচী, স্পর্শ কম্পিউটার নিয়ন্ত্রণ, রিমোট কন্ট্রোল নিয়ন্ত্রণ | ||
| অপারেটিং শব্দ স্তর | ≤৬০ ডেসিবেল | ||
| পেইন্টিং এর প্রয়োজনীয়তা | র্যাক কম্বিনেশন (কালো), উপরের কভার লাল, সামনে এবং পিছনে অ্যালুমিনিয়াম সাদা | ||
| পরিবেষ্টিত তাপমাত্রা | তাপমাত্রা: 0℃~50℃ আর্দ্রতা: 5% ~ 95% (কোন ঘনীভবন নেই) | ||