তথ্য 4D শাটল কনভেয়র সিস্টেম





চেইন কনভেয়র
| প্রকল্প | মৌলিক তথ্য | মন্তব্য |
| মডেল | এসএক্স-এলটিজে-১.০টি -৬০০এইচ | |
| মোটর রিডুসার | সেলাই | |
| কাঠামোর ধরণ | ফ্রেমটি অ্যালুমিনিয়াম খাদ দিয়ে তৈরি, এবং পা এবং বাঁকগুলি কার্বন ইস্পাত দিয়ে তৈরি | |
| নিয়ন্ত্রণ পদ্ধতি | ম্যানুয়াল/স্বয়ংক্রিয়/অনলাইন/স্বয়ংক্রিয় নিয়ন্ত্রণ | |
| নিরাপত্তা ব্যবস্থা | বৈদ্যুতিক ইন্টারলক, উভয় পাশে প্রতিরক্ষামূলক গাইড | |
| মান গ্রহণ করা | জেবি/টি৭০১৩-৯৩ | |
| পেলোড | সর্বোচ্চ ১০০০ কেজি | |
| পণ্যসম্ভার পরিদর্শন | আলোক-ইলেকট্রিক সেন্সর | অসুস্থ/পি+এফ |
| চেইন ট্র্যাক | কম ঘর্ষণ নাইলন ট্র্যাক | |
| কনভেয়র চেইন | ডংহুয়া চেইন | |
| ভারবহন | ফুকুইয়ামা হার্ডওয়্যার, সিল করা বল বিয়ারিং | |
| স্থানান্তর গতি | ১২ মি/মিনিট | |
| পৃষ্ঠ চিকিত্সা এবং আবরণ | আচার, ফসফেটিং, স্প্রে করা | |
| শব্দ নিয়ন্ত্রণ | ≤৭৩ ডেসিবেল | |
| পৃষ্ঠ আবরণ | কম্পিউটার ধূসর | সংযুক্ত নমুনা |
সরঞ্জামের কাঠামো
কনভেয়রটি ফ্রেম, আউটরিগার, ড্রাইভ ইউনিট ইত্যাদি দিয়ে তৈরি। ফ্রেমটি অ্যালুমিনিয়াম অ্যালয় দিয়ে তৈরি, এবং উভয় প্রান্তই স্থির দাঁতবিহীন রিভার্সিং চাকা দিয়ে তৈরি। কনভেয়র চেইনটি সোজা ডাবল-রো চেইন যার পিচ P=15.875 মিমি। চেইন সাপোর্টটি উচ্চ আণবিক পলিথিন (UHMW) দিয়ে তৈরি যার স্ব-তৈলাক্তকরণ প্রভাব রয়েছে। ওয়েল্ডেড আউটরিগারগুলি বোল্ট প্রেসার প্লেট দ্বারা প্রধান ফ্রেমের সাথে সংযুক্ত থাকে, M20 স্ক্রু অ্যাডজাস্টমেন্ট ফুটগুলি মাটির সাথে সংযুক্ত থাকে এবং কনভেয়িং পৃষ্ঠের উচ্চতা +25 মিমি দ্বারা সামঞ্জস্য করা যায়। ড্রাইভিং ডিভাইসটি মাঝখানে একটি বিল্ট-ইন ডিসিলারেশন মোটর, একটি ড্রাইভ শ্যাফ্ট অ্যাসেম্বলি, একটি ট্রান্সমিশন স্প্রোকেট সেট, একটি মোটর সিট এবং একটি চেইন টেনশনিং ডিভাইস এবং স্ক্রু-টাইপ অ্যাডজাস্টিং টেনশনার পুলি কনভেয়িং চেইনকে টেনশন করে।
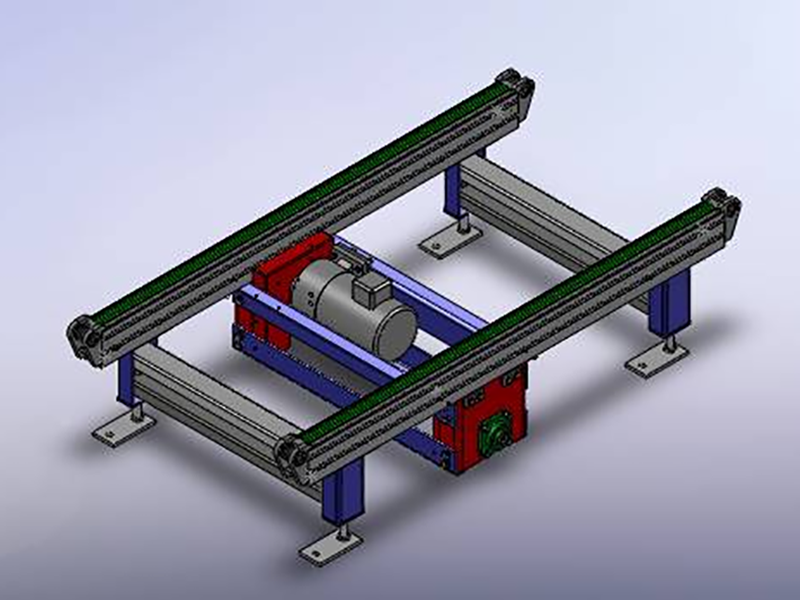
কাজের নীতি:
মোটরটি ট্রান্সমিশন গ্রুপের মাধ্যমে ড্রাইভ শ্যাফ্ট চালায় এবং ড্রাইভ শ্যাফ্ট প্যালেটের কনভেয়িং ফাংশন উপলব্ধি করার জন্য কনভেয়িং চেইন চালায়।
রোলার কনভেয়র
| আইটেম | মৌলিক তথ্য | মন্তব্য |
| মডেল | এসএক্স-জিটিজে-১.০টি -৬০০এইচ | ইস্পাত কাঠামো |
| মোটর রিডুসার | সেলাই | |
| কাঠামোর ধরণ | কার্বন ইস্পাত নমন | |
| নিয়ন্ত্রণ পদ্ধতি | ম্যানুয়াল/স্বয়ংক্রিয়/অনলাইন/স্বয়ংক্রিয় নিয়ন্ত্রণ | |
| পেলোড | সর্বোচ্চ ১০০০ কেজি | |
| স্থানান্তর গতি | ১২ মি/মিনিট | |
| বেলন | ৭৬ ডাবল চেইন রোলার | |
| ড্রাইভ চেইন | হুয়াডং চেইন কারখানা | |
| ভারবহন | হা অক্ষ | |
| পৃষ্ঠ চিকিত্সা এবং আবরণ | আচার, ফসফেটিং, স্প্রে করা | |
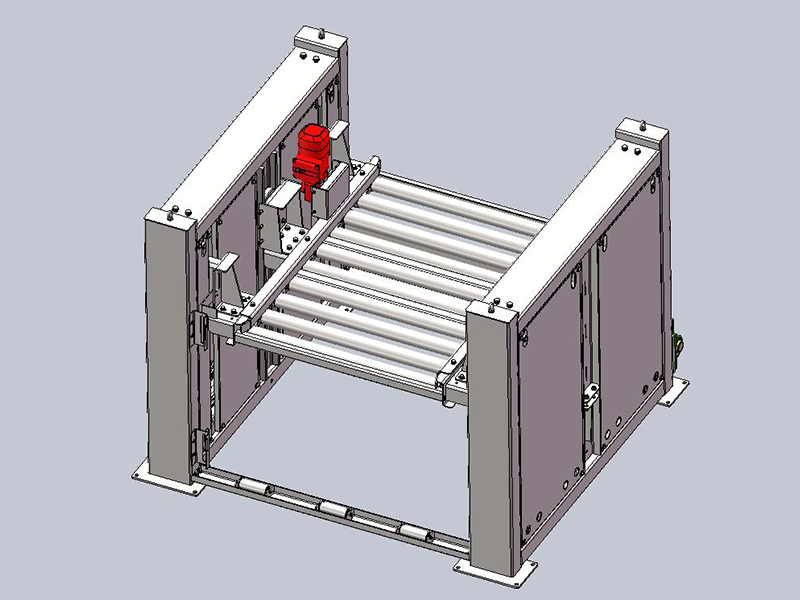
সরঞ্জামের কাঠামো
সরঞ্জামের কাঠামো: রোলার টেবিল মেশিনটি একটি ফ্রেম, আউটরিগার, রোলার, ড্রাইভ এবং অন্যান্য ইউনিট দিয়ে তৈরি। রোলার φ76x3 একক পার্শ্ব ডাবল স্প্রোকেট গ্যালভানাইজড রোলার, রোলারের ব্যবধান P=174.5 মিমি, একক পার্শ্ব ডাবল স্প্রোকেট। ওয়েল্ডেড আউটরিগারগুলি বোল্ট প্রেসার প্লেট দ্বারা মূল ফ্রেমের সাথে সংযুক্ত থাকে, M20 স্ক্রু অ্যাডজাস্টমেন্ট ফুটগুলি মাটির সাথে সংযুক্ত থাকে এবং কনভেয়িং পৃষ্ঠের উচ্চতা +25 মিমি দ্বারা সামঞ্জস্য করা যায়। ড্রাইভিং ডিভাইসটি মাঝখানে একটি অন্তর্নির্মিত ডিলেয়ারেশন মোটর, একটি ট্রান্সমিশন স্প্রোকেট সেট, একটি মোটর সিট এবং একটি চেইন টেনশনিং ডিভাইস দিয়ে তৈরি।
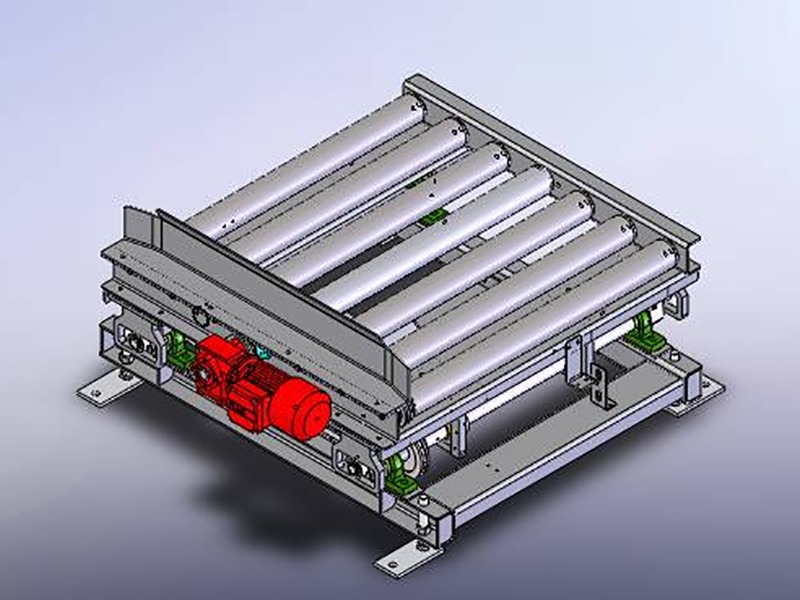
কাজের নীতি: মোটরটি চেইনের মধ্য দিয়ে রোলারটি চালায় এবং রোলারটি অন্য একটি চেইনের মাধ্যমে সংলগ্ন রোলারে এবং তারপর অন্য একটি রোলারে প্রেরণ করা হয় যাতে কনভেয়রের পরিবাহক কার্যটি উপলব্ধি করা যায়।
জ্যাকিং এবং ট্রান্সফার মেশিন
| প্রকল্প | মৌলিক তথ্য | মন্তব্য |
| মডেল | এসএক্স-ওয়াইজেডজে-১.০টি-৬ ০ ০এইচ | ইস্পাত কাঠামো |
| মোটর রিডুসার | সেলাই | |
| কাঠামোর ধরণ | কার্বন ইস্পাত নমন | |
| নিয়ন্ত্রণ পদ্ধতি | ম্যানুয়াল/স্বয়ংক্রিয়/অনলাইন/স্বয়ংক্রিয় নিয়ন্ত্রণ | |
| নিরাপত্তা ব্যবস্থা | বৈদ্যুতিক ইন্টারলক, উভয় পাশে প্রতিরক্ষামূলক গাইড | |
| স্ট্যান্ডার্ড | জেবি/টি৭০১৩-৯৩ | |
| পেলোড | সর্বোচ্চ ১০০০ কেজি | |
| পণ্যসম্ভার পরিদর্শন | আলোক-ইলেকট্রিক সেন্সর | অসুস্থ/পি+এফ |
| বেলন | ৭৬ ডাবল চেইন রোলার | |
| বিয়ারিং এবং হাউজিং | বিয়ারিং: হারবিন শ্যাফ্ট; বিয়ারিং সিট: ফুশান এফএসবি | |
| স্থানান্তর গতি | ১২ মি/মিনিট | |
| পৃষ্ঠ চিকিত্সা এবং আবরণ | আচার, ফসফেটিং, স্প্রে করা | |
| শব্দ নিয়ন্ত্রণ | ≤৭৩ ডেসিবেল | |
| পৃষ্ঠ আবরণ | কম্পিউটার ধূসর | সংযুক্ত নমুনা |
সরঞ্জামের কাঠামো
সরঞ্জামের কাঠামো: রোলার ট্রান্সফার মেশিনটি কনভেয়িং পার্টস, লিফটিং মেকানিজম, গাইডিং কম্পোনেন্ট এবং অন্যান্য ইউনিট দিয়ে তৈরি। কনভেয়িং পৃষ্ঠের উচ্চতা সমন্বয় +25 মিমি। লিফটিং মেকানিজম মোটর-চালিত ক্র্যাঙ্ক আর্মের নীতি গ্রহণ করে এবং ড্রাইভিং ডিভাইসটি মাঝখানে একটি অন্তর্নির্মিত রিডাকশন মোটর, একটি ট্রান্সমিশন স্প্রোকেট সেট, একটি মোটর সিট এবং একটি চেইন টেনশনিং ডিভাইস দিয়ে তৈরি।
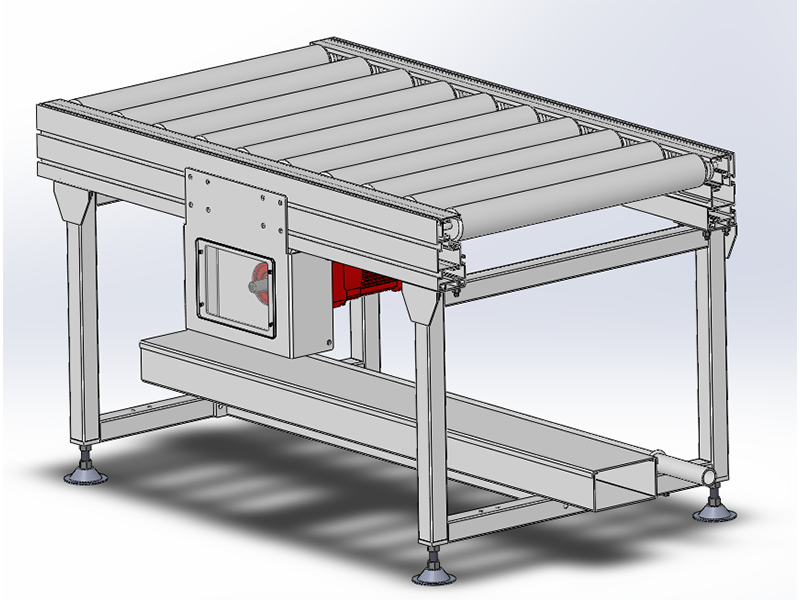
কাজের নীতি: যখন প্যালেটটি ম্যাচিং কনভেয়র দ্বারা সরঞ্জামে পৌঁছে দেওয়া হয়, তখন জ্যাকিং মোটরটি চলে, প্যালেটটি তোলার জন্য ক্যাম প্রক্রিয়াটি চালায় এবং জ্যাকিং মোটরটি যখন এটি জায়গায় থাকে তখন থেমে যায়; কনভেয়িং মোটরটি শুরু হয়, প্যালেটটিকে ডকিং সরঞ্জামে পৌঁছে দেয়, এবং মোটরটি থামে, জ্যাকিং মোটরটি চলে এবং ক্যাম প্রক্রিয়াটি সরঞ্জামটি নামানোর জন্য চালিত হয় এবং যখন এটি জায়গায় থাকে, তখন জ্যাকিং মোটরটি একটি কার্যচক্র সম্পূর্ণ করার জন্য থেমে যায়।
ট্রানজিশন কনভেয়র
| ১) প্রকল্প | মৌলিক তথ্য | মন্তব্য |
| মডেল | এসএক্স-জিডিএলটিজে-১.০টি-৫০০এইচ-১.৬লিটার | |
| মোটর রিডুসার | সেলাই | |
| কাঠামোর ধরণ | পা এবং বাঁকানো কার্বন ইস্পাত | |
| নিয়ন্ত্রণ পদ্ধতি | ম্যানুয়াল/স্বয়ংক্রিয়/অনলাইন/স্বয়ংক্রিয় নিয়ন্ত্রণ | |
| নিরাপত্তা ব্যবস্থা | বৈদ্যুতিক ইন্টারলক, উভয় পাশে প্রতিরক্ষামূলক গাইড | |
| স্ট্যান্ডার্ড | জেবি/টি৭০১৩-৯৩ | |
| পেলোড | সর্বোচ্চ ১০০০ কেজি | |
| পণ্যসম্ভার পরিদর্শন | আলোক-ইলেকট্রিক সেন্সর | অসুস্থ/পি+এফ |
| চেইন ট্র্যাক | কম ঘর্ষণ নাইলন ট্র্যাক | |
| কনভেয়র চেইন | ডংহুয়া চেইন | |
| বিয়ারিং এবং হাউজিং | বিয়ারিং: হারবিন শ্যাফ্ট, বিয়ারিং সিট: ফুকুইয়ামা এফএসবি | |
| স্থানান্তর গতি | ১২ মি/মিনিট | |
| পৃষ্ঠ চিকিত্সা এবং আবরণ | আচার, ফসফেটিং, স্প্রে করা | |
| শব্দ নিয়ন্ত্রণ | ≤৭৩ ডেসিবেল | |
| পৃষ্ঠ আবরণ | কম্পিউটার ধূসর | সংযুক্ত নমুনা |
সরঞ্জামের কাঠামো
সরঞ্জামের কাঠামো: এই সরঞ্জামটি হোস্ট এবং শেল্ফের সংযোগস্থলে ব্যবহৃত হয় এবং কনভেয়রটি একটি ফ্রেম, আউটরিগার এবং একটি ড্রাইভ ইউনিট দিয়ে তৈরি। কনভেয়র চেইনটি সোজা ডাবল-রো চেইন যার পিচ P=15.875 মিমি। চেইন সাপোর্টটি উচ্চ আণবিক পলিথিন (UHMW) দিয়ে তৈরি যার স্ব-লুব্রিকেটিং প্রভাব রয়েছে। ঝালাই করা পা, শেল্ফ বডির সাথে সংযুক্ত। ড্রাইভিং ডিভাইসটি মাঝখানে একটি অন্তর্নির্মিত ডিসিলারেশন মোটর, একটি ড্রাইভ শ্যাফ্ট অ্যাসেম্বলি, একটি ট্রান্সমিশন স্প্রোকেট সেট, একটি মোটর সিট এবং একটি চেইন টেনশনিং ডিভাইস এবং স্ক্রু-টাইপ অ্যাডজাস্টিং টেনশনার পুলি কনভেয়িং চেইনকে টান দেয়।
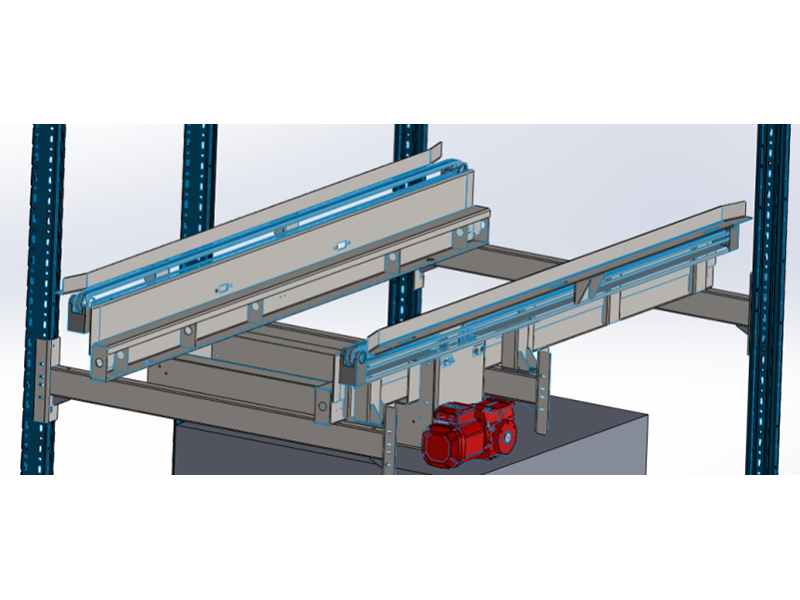
কাজের নীতি: মোটর ট্রান্সমিশন গ্রুপের মাধ্যমে ড্রাইভ শ্যাফ্ট চালায় এবং ড্রাইভ শ্যাফ্ট প্যালেটের কনভেয়িং ফাংশন উপলব্ধি করার জন্য কনভেয়িং চেইন চালায়।
মেঝে লিফট
| প্রকল্প | মৌলিক তথ্য | মন্তব্য |
| মডেল | এলডিটিএসজে-১.০টি-৭০০এইচ | ইস্পাত কাঠামো |
| মোটর রিডুসার | সেলাই | |
| কাঠামোর ধরণ | কলাম: কার্বন ইস্পাত নমন বাইরের দিক: ইস্পাত প্লেট সীল | |
| নিয়ন্ত্রণ পদ্ধতি | ম্যানুয়াল/স্বয়ংক্রিয়/অনলাইন/স্বয়ংক্রিয় নিয়ন্ত্রণ | |
| নিরাপত্তা ব্যবস্থা | বৈদ্যুতিক ইন্টারলক, পতন গ্রেফতার ডিভাইস | |
| স্ট্যান্ডার্ড | জেবি/টি৭০১৩-৯৩ | |
| পেলোড | সর্বোচ্চ ১০০০ কেজি | |
| পণ্যসম্ভার পরিদর্শন | আলোক-ইলেকট্রিক সেন্সর | অসুস্থ/পি+এফ |
| বেলন | ৭৬ ডাবল চেইন রোলার | |
| উত্তোলন শৃঙ্খল | ডংহুয়া চেইন | |
| ভারবহন | সাধারণ বিয়ারিং: হারবিন শ্যাফ্ট কী বিয়ারিং: এনএসকে | |
| চলমান গতি | পরিবহন গতি: ১৬ মি/মিনিট, উত্তোলনের গতি: ৬ মি/মিনিট | |
| পৃষ্ঠ চিকিত্সা এবং আবরণ | আচার, ফসফেটিং, স্প্রে করা | |
| শব্দ নিয়ন্ত্রণ | ≤৭৩ ডেসিবেল | |
| পৃষ্ঠ আবরণ | কম্পিউটার ধূসর | সংযুক্ত নমুনা |
প্রধান কাঠামো এবং বৈশিষ্ট্য
ফ্রেম: ৫ মিমি কার্বন স্টিলের বাঁকানো প্লেট কলাম হিসেবে ব্যবহার করা হয়, এবং বাইরের অংশটি স্টিলের প্লেট দিয়ে সিল করা হয়;
উত্তোলন অংশ:
লিফটের উপরে একটি লিফটিং ফ্রেম স্থাপন করা হয়, ফ্রেমটি কার্বন ইস্পাত দিয়ে তৈরি, এবং লিফটিং মোটর লিফটিং স্প্রোকেট অ্যাসেম্বলিকে চেইনের মধ্য দিয়ে কাজ করার জন্য চালিত করে।
প্ল্যাটফর্ম লোড হচ্ছে:
কার্বন ইস্পাত দিয়ে তৈরি। লোডিং প্ল্যাটফর্মটি একটি স্ট্যান্ডার্ড কনভেয়র দিয়ে সজ্জিত।
কাজের নীতি:
লিফটিং মোটর লোডিং প্ল্যাটফর্মটি চালায় যাতে লিফটিং কাজ সম্পন্ন হয়; লোডিং প্ল্যাটফর্মের কনভেয়র পণ্যগুলিকে লিফটে মসৃণভাবে প্রবেশ এবং প্রস্থান করতে পারে।



